AHN: The making of
1. Vliegplan
De leverancier van de data start met het maken van een vliegplan. Hiervoor heeft hij een aantal zaken nodig:
- Gebiedsbegrenzing
- Specificaties van de data (puntdichtheid, puntverdeling)
Op basis van de gevraagde puntdichtheid bepaalt de leverancier de vlieghoogte. Daarbij zijn ook de volgende gegevens van belang:
- Reflectiviteit van het terrein in combinatie met de scannerinstellingen
- Terrein hoogte variatie
- Snelheid van het vliegtuig
Ad 1. De reflectiviteit van het terrein bepaalt hoeveel signaal het terrein reflecteert. Hoe minder het terrein reflecteert hoe lager de vlieghoogte moet zijn. Een andere optie is om de power van de laserscanner te verhogen maar daardoor wordt de pulsfrequentie (het aantal pulsen dat per seconde wordt uitgezonden) verlaagd.
Ad 2. Bij hoogtevariatie in het terrein is de laagste hoogte bepalend voor het behalen van de minimale puntdichtheid. De hoogste hoogte bepaalt vervolgens de effectieve strookbreedte.
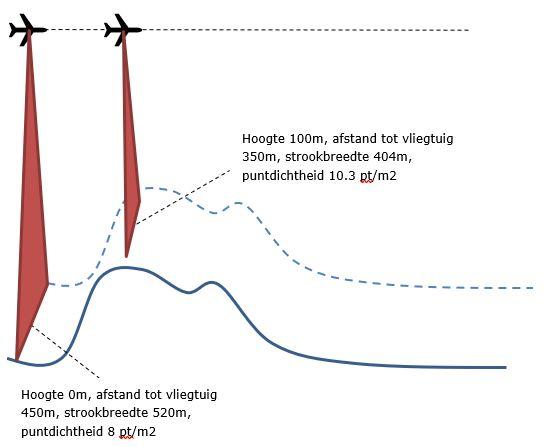
Ad 3. Hoe langzamer het vliegtuig vliegt hoe hoger de puntdichtheid op de grond. Tot voor kort waren langzame vliegtuigen noodzakelijk om in één strook een puntdichtheid van 8 pt/m2 te realiseren. Met de snelle ontwikkeling van de LiDAR systemen wordt een veel hogere puntdichtheid gerealiseerd in één vliegstrook. Daardoor kunnen vliegtuigen hoger en/of harder gaan vliegen om de minimumeis te realiseren.
Uiteindelijk resulteren deze uitgangspunten in een ideale vlieghoogte en resulterende breedte van de vliegstrook. Deze vliegstroken worden vervolgens zo efficiënt mogelijk over het in te vliegen gebied gepland.
Tot slot zijn beperkingen in het luchtruim van grote invloed op de vliegplanning. Dit vereist soms om op andere hoogte te gaan vliegen of om vluchten op andere tijdstippen in te moeten plannen.
2. Vluchtuitvoering
Als het vluchtplan definitief is vastgesteld moet dit ingediend worden bij de luchtverkeersleiding Nederland (LVNL) zodat bekend is welke vliegstroken gevlogen gaan worden.
2.1 Vluchtomstandigheden
De vluchtuitvoering vindt plaats in het bladloze seizoen, dat loopt grofweg van december tot en met maart. Voor LiDAR metingen is het van belang dat er geen wolken onder het vliegtuig hangen omdat daar de metingen niet doorheen gaan en dat het terrein vrij is van overstromingen of bedekking door sneeuw, ijzel, hagel, etc. Vluchten kunnen in principe in het donker worden uitgevoerd omdat er geen daglicht nodig is zoals bij luchtfoto’s. In de praktijk is het verkrijgen van vliegtoestemming ’s avonds en ’s nachts lastig en worden de meeste metingen overdag uitgevoerd.
2.2 Vliegrestrictie
Als aan deze voorwaarden is voldaan vraagt de vlieger toestemming aan bij LVNL om de vlucht te mogen uitvoeren. Er zijn nog verschillende restricties waar rekening mee gehouden moet worden. Zo zijn er gebieden rondom vliegvelden waar bepaalde restricties gelden. Bijvoorbeeld, in de directe omgeving van Schiphol (CTR) kan in principe alleen boven de 14.000ft gevlogen worden. ’s Nachts zijn er mogelijk kansen om op lagere hoogte te vliegen. In de ruimere omgeving van Schiphol (TMA) geldt dezelfde restrictie maar daar kan ook onder de 1500ft gevlogen worden. Rondom vliegveld Eindhoven wordt het ook steeds lastiger om toestemming te krijgen om te vliegen.
Naast restricties rondom vliegvelden zijn er ook restrictiegebieden rondom o.a. militaire gebieden en koninklijke paleizen. Verder zijn er soms evenementen zoals de militaire oefening Frisian Flag, of vliegshows / parachutesprong evenementen etc. die kunnen betekenen dat er op een bepaalde locatie geen toestemming kan worden verkregen.
2.3 De vlucht
Zodra de toestemming is verkregen gaat de vlieger de lucht in. Het vliegtuig wordt bestuurd door een piloot. Verder is er een operator aan boord die de bediening van de apparatuur op zich neemt. De piloot volgt de geplande vliegstroken en de scanner wordt ingeschakeld vlak voor het begin van de vliegstrook en uitgeschakeld vlak na het einde van de vliegstrook. Naast de LiDAR scanner bevat het vliegtuig een GPS-systeem dat de locatie van het vliegtuig monitort en een IMU (Inertial Measurement Unit) die de bewegingen van de scanner monitort. Bij luchtfoto’s is het gebruik van een stabilized mount al gebruikelijk, bij LiDAR wordt dat sinds kort ook toegepast. Dit is een platform in het vliegtuig waar de LiDAR op is geïnstalleerd die loodrecht naar beneden blijft kijken zodat de bewegingen van het vliegtuig geen effect hebben op de data. Na afloop van de vlucht worden de harde schijven met ruwe data uit het vliegtuig gehaald en naar kantoor gebracht.
3. Geometrische processing
Alle data wordt vervolgens zo snel mogelijk gecontroleerd zodat inzichtelijk kan worden gemaakt of de ingewonnen data compleet is.
3.1 Trajectberekening
Allereerst wordt het gevlogen traject berekend. Daarvoor zijn de volgende gegevens noodzakelijk:
- GPS-IMU gegevens uit het vliegtuig
- GPS-basisstations
De vluchtbewegingen van de scanner worden door de IMU continu gemeten (bijv. 200 keer per seconde). De GPS meet iedere seconde de locatie van het vliegtuig. Deze systemen worden gekoppeld aan de GPS-basisstations op de grond die continue meten en waarvan de coördinaten bekend zijn. Zodoende wordt een traject berekend dat voor iedere meting van de LiDAR weet wat de locatie en de stand van het vliegtuig waren.
3.2 Creeren puntenwolk
In de volgende stap wordt de puntenwolk uitgevoerd. Input voor deze stap zijn de:
- Trajectberekeningen
- Ruwe LiDAR data
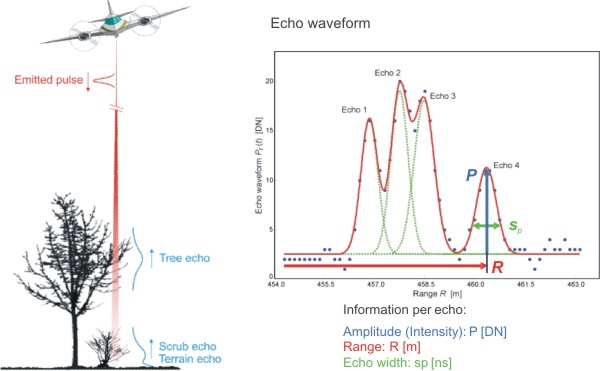
De ruwe LiDAR data wordt vervolgens gecombineerd met het berekende traject. Zo is van iedere uitgezonden puls bekend wat de positie en de stand van het vliegtuig was. De uitgezonden puls wordt gereflecteerd op het aardoppervlak en vervolgens wordt het full wave form signaal terugontvangen en gedigitaliseerd opgeslagen. Soms reflecteert het signaal enkel op het aardoppervlak, soms reflecteert hij eerst in vegetatie en uiteindelijk op het aardoppervlak. Het ontvangen signaal ziet er bijvoorbeeld uit zoals het rode signaal in onderstaande figuur (rechts).

https://opals.geo.tuwien.ac.at/html/stable/fwf-als-principle_small.jpg 30-09-2019
{kind=link}
Van ieder signaal moet dus bepaald worden welke echo’s relevant zijn. De looptijd van het signaal tot de echo bepaalt de afstand vanaf het vliegtuig. In combinatie met de positie en stand van het vliegtuig op het moment van versturen van de puls levert vervolgens de coördinaten van het gemeten punt. Aan ieder punt worden vervolgens een aantal karakteristieken meegegeven die in een later stadium relevant kunnen zijn voor het gebruik van de data. Dit zijn o.a.:
- X,Y,Z
- Intensiteit
- Return nummer, totaal aantal returns
- Scan hoek
- Vliegstrook
- Tijdstip
Resultaat van deze stap is een globaal geogerefereerde puntenwolk met bijbehorende data per punt. Nu moet deze puntenwolk nog geometrisch gecorrigeerd worden.
3.3 Kalibratie
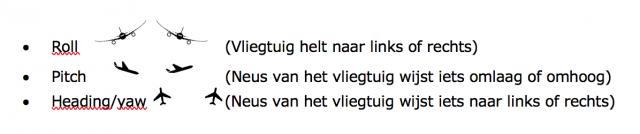
De puntenwolken zijn per vliegstrook opgeslagen. De vliegstroken overlappen elkaar meestal ergens tussen de 20 en 35%. Deze overlap wordt gebruikt om de data goed op elkaar aan te sluiten, immers, een huis in de ene vliegstrook moet op dezelfde plek liggen als datzelfde huis in de andere vliegstrook. Het goed op elkaar aansluiten van deze vliegstroken noemen we kalibreren. De kalibratie van de data gebeurt meestal eerst per vlucht en vervolgens worden alle vluchten samengevoegd en wordt gecontroleerd of de vluchten op elkaar aansluiten. Voor de kalibratie van de data wordt in principe aan drie parameters gedraaid:
Bij een perfect gekalibreerde dataset vallen de zadeldaken in de overlappende delen van de dataset exact op elkaar zoals is te zien in onderstaande figuur. Het effect van het draaien aan deze parameters op de data kan als volgt worden gevisualiseerd.
http://elektromot.com/wp-content/uploads/2017/11/1-1.jpg
Bij een perfect gekalibreerde dataset vallen de zadeldaken in de overlappende delen van de dataset exact op elkaar zoals is te zien in onderstaande figuur. Het effect van het draaien aan deze parameters op de data kan als volgt worden gevisualiseerd.

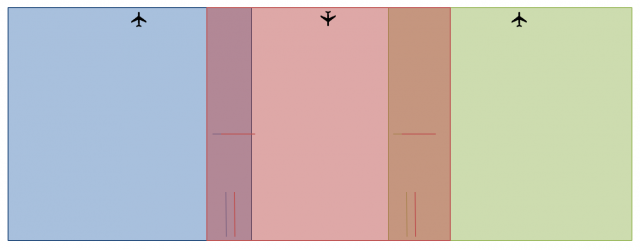
In een niet perfect gekalibreerde dataset is dat dus niet het geval. De kunst is nu om aan de afwijkingen van de zadeldaken te zien aan welke parameter gedraaid moet worden om de data geometrisch te verbeteren. Hieronder is gevisualiseerd welke patronen typisch zijn voor een restfout in de verschillende kalibratie parameters.
Bovenaanzicht vliegstroken, blauw en groen zijn in dezelfde richting gevlogen, rood in tegengestelde richting. Verder representeren de lijnen de zadeldaken die parallel en loodrecht op de vliegrichting gesitueerd zijn. In deze ideale situatie liggen de zadeldaken van de overlappende vliegstroken precies over elkaar.
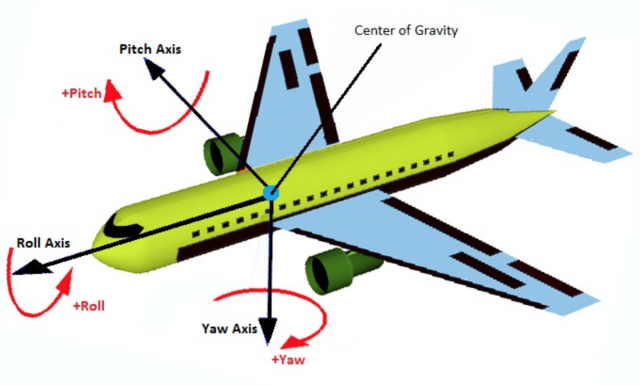
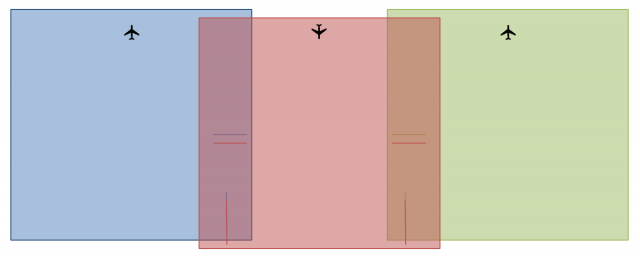
Als er nog een afwijking in de roll parameter zit dan uit zich dat als volgt in de data.
De roll uit zich van bovenaf gezien in een verschuiving van de vliegstroken naar links of rechts gezien vanuit de vliegrichting. Doordat stroken vaak tegengesteld gevlogen worden uit zich dit in een afwijking tussen de zadeldaken parallel aan de vliegrichting.
Als er nog een afwijking in de pitch parameter zit uit zich dat als volgt in de data.
De pitch uit zich van bovenaf gezien in een verschuiving van de vliegstroken naar voren of achteren gezien vanuit de vliegrichting. Doordat stroken vaak tegengesteld gevlogen worden uit zich dit in een afwijking tussen de zadeldaken loodrecht op de vliegrichting.
Als er nog een afwijking in de heading parameter zit uit zich dat als volgt in de data.
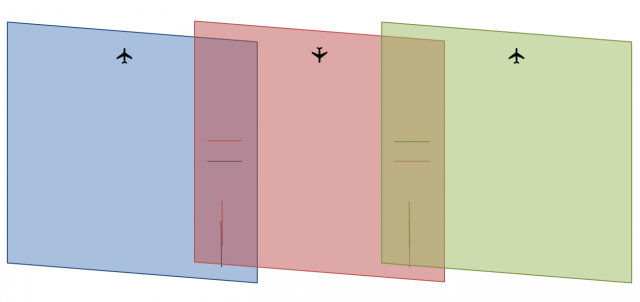
De heading uit zich van bovenaf gezien in een verschuiving van de vliegstroken naar voren aan de ene kant van het vliegtuig en naar achteren aan de andere kant van het vliegtuig, het is eigenlijk een verdraaiing van de vliegstrook. Doordat stroken vaak tegengesteld gevlogen worden uit zich dit in een afwijking tussen de zadeldaken loodrecht op de vliegrichting, maar anders dan bij de pitch verschuiven de zadeldaken aan beide zijden van de strook in tegengestelde richting.
Tegenwoordig worden overigens veelal de noklijnen van de zadeldaken uit de LiDAR puntenwolken gedestilleerd en wordt er, in combinatie met het gevlogen traject, automatisch een oplossing bepaald voor de kalibratieparameters.
3.4 Shiften
Als de kalibratie is afgerond is de horizontale of XY-positie van de data goed. Vervolgens wordt naar de hoogte van de data gekeken. Ook hier wordt gebruik gemaakt van de overlap tussen de vliegstroken. Op maaiveldniveau wordt een gemiddeld verschil berekend tussen de hoogte van de ene strook en de andere strook. Dit wordt gedaan voor alle strookoverlappen binnen een project. Doordat er ook dwarsstroken worden gevlogen ontstaat overtalligheid en dus controle om de hoogteverschillen betrouwbaar te vereffenen. Er wordt een vereffening uitgevoerd waarbij in de eerste fase de relatieve hoogteverschillen worden vereffend zodat het gemeten gebied als geheel goed op elkaar aansluit. In een tweede fase wordt het hele projectgebied zo goed mogelijk aangesloten op de gemeten referentievelden. Dit zijn velden (meestal asfalt, verharding, kunstgrasvelden, etc.) van ongeveer 5x5 meter die landmeetkundig zijn ingemeten en waarvan de coördinaten in NAP een stuk nauwkeuriger zijn dan de LiDAR metingen. Deze zijn vaak gewaterpast (3-10 mm nauwkeurigheid) of met GPS ingemeten (2-3 cm nauwkeurigheid).
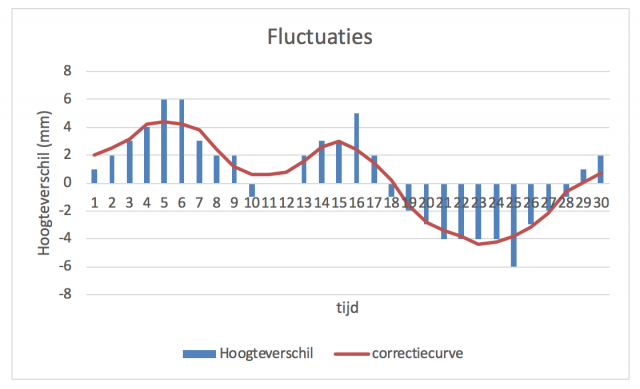
3.5 Fluctuaties
Het kan zijn dat er in de lengterichting van de vliegstrook nog wat minimale hoogteschommelingen zitten. Deze kunnen opgelost worden door de vliegstrook op te knippen in stukjes van een bepaalde tijdseenheid en voor die stukjes de hoogteverschillen met de overlappende stroken te berekenen. Zodoende krijg je een heleboel hoogteverschillen in de tijd. De software schat daar de beste curve doorheen om deze verschillen te minimaliseren en past deze vervolgens toe op de data.
4. Classificatie
Nu de geometrie van de data correct is kan worden begonnen met de classificatie. Dat houdt in dat aan ieder LiDAR puntje een klasse wordt gehangen. Voor AHN3 zijn dat de klassen:
- Maaiveld
- Gebouwen
- Water
- Kunstwerken en
- Overig
4.1 Automatische classificatie
De eerste stap in het classificatieproces is een automatische classificatie waarin zoveel mogelijk geclassificeerd wordt. Immers, hoe beter de automatische classificatie, hoe minder handmatige correctie achteraf noodzakelijk is.
Allereerst worden outliers/ruis verwijderd. Dit zijn punten die niet daadwerkelijk iets voorstellen waarin we geïnteresseerd zijn. Te denken valt aan reflecties in de lucht door vocht, reflecties op vogels en reflecties onder het maaiveld. Zodra de puntenwolk grotendeels vrij is van ruis is wordt begonnen met een classificatie van het maaiveld.
Het maaiveld wordt geclassificeerd door te beginnen met een aantal lage punten. Deze worden getrianguleerd en vervolgens worden punten toegevoegd aan deze klasse als ze niet te sterk afwijken van het tot dan toe bekende grondmodel. Uitgangspunt is dat grond een glooiend verloop kent en geen plotselinge hoogtesprongen maakt. Kenmerkend van deze stap is dat water ook voldoet aan dit model en dus in de grondklasse terecht komt.
Een volgende stap is om gebouwen te classificeren. Deze stap is automatisch vrij goed uit te voeren. Gebouwen maken duidelijke hoogtesprongen ten opzichte van het maaiveld en alle punten die een gebouw raken zijn de laatste return. Dit onderscheidt gebouwen duidelijk van vegetatie waar de punten vaak een eerste of tussenliggende return zijn omdat het signaal later de grond nog raakt. Verder gaan we bij gebouwen uit van een minimale grootte. Dit onderscheidt ze van andere harde objecten als auto’s.
Wat overblijft in de classificatie is de restklasse. Hierin zitten alle andere objecten zoals vegetatie, straatmeubilair, voertuigen, containers, portalen, etc.
4.2 Handmatige correctie van de classificatie
Na de automatische classificatie moet de data nog flink verbeterd worden. Zo moet al het water uit de maaiveld klasse gehaald worden en als water geclassificeerd worden. Verder zitten er nog veel tijdelijke objecten in de grondklasse die eruit gehaald moeten worden. Hierbij valt te denken aan tijdelijke heuvels, kuilvoer, vlonders/steigers, bruggen, etc.
De vlonders/steigers, bruggen en ook portaalmasten van autosnelwegen worden handmatig geclassificeerd naar de klasse kunstwerken.
Verder wordt alles netjes nagelopen om te zien of het correct is geclassificeerd. Zo zijn perkjes met dichte lage vegetatie nog wel eens als grond geclassificeerd. Overhangende bomen boven huizen zijn soms deels ook als gebouw geclassificeerd. Bij hoogtesprongen in de grond, zoals bijvoorbeeld de aanloop naar een brug of een pad dat omhoog loopt met een rechte muur ernaast ontstaat vaak een randje vlak naast de hoogtesprong dat als overig is geclassificeerd. Aspergevelden hebben zoveel hoogtesprongen dat de toppen van de zanddijkjes vaak ook als overig zijn geclassificeerd. Zo zijn er tal van situaties die allemaal nagelopen moeten worden. In sommige gevallen kan een klein gebied geïsoleerd worden en kan op dat gebied een specifieke automatische classificatie uitgevoerd worden, in andere gevallen wordt handmatig de classificatie aangepast.
5. Producten
De geclassificeerde puntenwolk is de basis. Verder zijn er een aantal afgeleide producten die veelvuldig gebruikt worden.
5.1 LAZ puntenwolk
De LAZ puntenwolk is een bestand waarin alle metingen beschikbaar zijn zoals ze zijn gedaan inclusief alle kenmerken van dat punt zoals intensiteit, klasse, vliegstrooknummer, tijdstip, etc (zie 3.2). LAZ is een gecomprimeerd LAS bestand dat door de meeste software rechtstreeks ingelezen kan worden. LAZ puntenwolken zijn wel zware bestanden. De meeste gebruikers gebruiken daarom afgeleide producten. LAZ puntenwolken zijn uitermate geschikt om extra analyses op de data uit te voeren en om volledig gebruik te maken van de classificatie van de data.
5.2 Digitaal Terrein Bestand
Van alle als maaiveld geclassificeerde punten wordt een DTM (Digital Terrain Model) gemaakt. Middels de Squared Inverse Distance Weighting methode wordt voor iedere cel van 50x50 cm een waarde berekend die het best de waarde van het centrum van deze cel representeert. Lege cellen krijgen een “no-data” waarde. Zodoende ontstaat voor het hele projectgebied een raster dat de hoogte van het maaiveld representeert. Dit raster bevat gaten op plekken waar geen maaiveld gemeten is zoals in water en onder gebouwen.
Van dit raster wordt vervolgens een 5m raster afgeleid. Voor iedere cel van 5x5 meter wordt de gemiddelde waarde van alle 50x50 cm cellen genomen als waarde, tenzij meer dan 60% van de 50x50 cm cellen een “no-data” waarde heeft, dan krijgt de 5x5 m cel ook een “no-data” waarde.
Deze rasterbestanden in GeoTiff formaat zijn heel makkelijk te gebruiken in allerlei (GIS) software pakketten.
5.3 Digitaal Hoogtebestand
Naast de terreinbestanden die het maaiveld representeren zijn er ook bestanden die alle data representeren behalve de klasse water. Deze DSM bestanden (Digital Surface Model) worden op dezelfde wijze gemaakt als de DTM bestanden alleen worden dan niet enkel de maaiveld punten meegenomen maar ook de gebouwen, kunstwerken en overige punten. Water blijft ook hier buiten beschouwing en wordt derhalve als “no-data” gepresenteerd.
6. Controle
De voorgaande stappen worden allemaal door de leverancier inwinning uitgevoerd. Deze levert de data vervolgens aan Het Waterschapshuis. De data wordt vervolgens gecontroleerd door een onafhankelijke controlepartij. Deze controleert onafhankelijk van de leverancier of aan alle voorwaarden uit het contract is voldaan. De volgende controles worden uitgevoerd:
- Navigatie (Is het volledige projectgebied gevlogen en zitten er geen gaten tussen de vliegstroken)
- Relatieve planimetrie (Sluiten de noklijnen van de overlappende stroken op elkaar aan)
- Absolute planimetrie (Sluiten de noklijnen van de LiDAR data aan op onafhankelijk gemeten referentie-objecten)
- Relatieve hoogte (Sluit het maaiveld van overlappende stroken goed op elkaar aan)
- Absolute hoogte (Sluit het maaiveld van de LiDAR data aan op onafhankelijk gemeten referentie velden)
- Puntdichtheid (Voldoet de resulterende puntdichtheid aan de eisen)
- Puntverdeling (Voldoet de resulterende puntverdeling aan de eisen, m.a.w. liggen de meetpunten niet allemaal vlak bij elkaar maar zijn ze regelmatig gespreid)
- Classificatie (Zijn alle punten geclassificeerd volgens de specificaties)
- Herbemonstering (Zijn de 50cm en 5m rasterbestanden op een juiste wijze afgeleid van de LAZ data)